1. 非局部均值滤波
非局部均值滤波(Non-Local Means,NL-Means)是一种 非线性 的图像去噪算法。它基于图像中的像素具有相似结构这一假设,利用图像的全局信息来对图像进行去噪。
1.1 全局算法 VS 局部算法
非局部均值滤波在计算每个像素点的估计值时,会考虑图像中所有与该像素点具有 相似 邻域结构的像素点。因此,非局部均值滤波是一种 全局算法 。
那么相对于全局算法的 局部算法 是什么呢? 局部算法 是指仅利用图像局部信息进行处理的算法。例如其邻域窗口内的信息,来计算该像素点的估计值。常用的局部算法包括:
均值滤波
中值滤波
高斯滤波
双边滤波
局部算法的优点是计算量小,速度快。但其缺点是去噪效果有限,容易造成图像细节丢失。
1.2 均值滤波和非局部均值滤波的区别
均值滤波:对于图像中的每个像素点,其滤波值是其邻域窗口内所有像素点的平均值。
非局部均值滤波:该算法需要计算图像中 所有像素 与当前像素之间的相似性。首先需要定义一个 大的搜索窗口 和 一个小的邻域窗口 。搜索窗口用于搜索与当前像素点具有相似邻域结构的像素点,邻域窗口用于计算像素点之间的相似度。邻域窗口在搜索窗口中滑动,对于搜索窗口内的每个像素点,计算其与当前像素点的邻域窗口的相似度,并将其作为 权重 。相似度越大则权重越大。
非局部均值滤波的基本原理与均值滤波类似都要取平均值,但是非局部均值滤波在计算中加入了每一个点的权重。
非局部均值滤波是一种比均值滤波更先进的图像去噪方法,但其计算量也更大。
1.3 非局部均值滤波的原理
非局部均值滤波的公式如下:
其中,w(x,y) 是一个权重,表示在原始图像 v 中,像素 x 和像素 y 的相似度。是像素 x 的搜索窗口。是滤波后的图像。
常用的 相似度度量 方法包括:欧式距离、高斯相似度、L1 范数、L2 范数、MSE 等等。
衡量两个图像块的相似度最常用的方法是计算他们之间的欧氏距离:
其中:
n(x) 是一个 归一化 的因子,是所有权重的和。对每个权重除以该因子后,使得权重满足和为1的条件。
a 是高斯核的标准差。在求欧式距离的时候,不同位置的像素的权重是不一样的,距离块的中心越近,权重越大,距离中心越远,权重越小,权重服从高斯分布。实际计算中常常采用均匀分布的权重。
h 是滤波系数。控制指数函数的衰减从而改变欧氏距离的权重,h >0 。
非局部均值滤波的复杂度跟 图像的大小、搜索窗口的大小、相似度计算方法、权重计算方法 密切相关。
2. 非局部均值滤波的实现
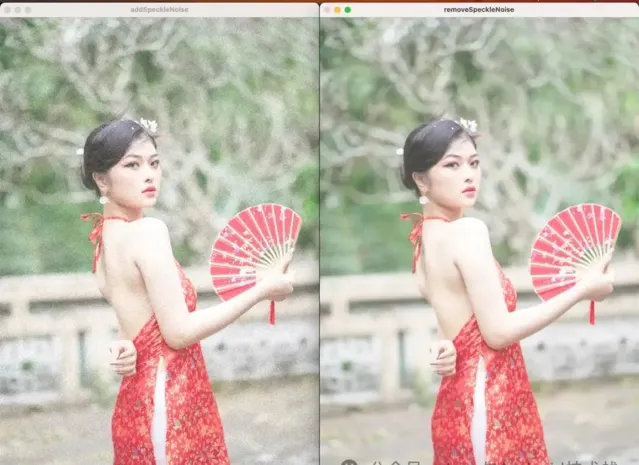
下面的例子,是在图像中添加斑点噪声,然后用非局部均值滤波消除噪声。
#include<opencv2/opencv.hpp>
#include<opencv2/core.hpp>
#include<opencv2/highgui.hpp>
#include<random>
usingnamespacestd;
usingnamespace cv;
voidaddSpeckleNoise(Mat& image, double scale, Mat &dst){
dst = image.clone();
RNG rng;
dst.forEach<Pixel>([&](Pixel &p, constint * position) -> void {
int row = position[0];
int col = position[1];
double random_value = rng.uniform(0.0, 1.0);
double noise_intensity = random_value * scale;
dst.at<Vec3b>(row, col) = dst.at<Vec3b>(row, col) + Vec3b(noise_intensity * 255, noise_intensity * 255, noise_intensity * 255);
});
}
//NL-means 算法的实现
voidnonlocalMeansFilter(Mat& src, Mat& dst, int templeteWindowSize, int searchWindowSize, double h, double sigma = 0.0){
//邻域的大小不能超过搜索窗口的大小
if (templeteWindowSize > searchWindowSize){
cout << "searchWindowSize should be larger than templeteWindowSize" << endl;
return;
}
if (dst.empty())
dst = Mat::zeros(src.size(), src.type());
constint tr = templeteWindowSize >> 1;//tr为邻域的中心位置
constint sr = searchWindowSize >> 1; //sr为搜索域的中心位置
constint bb = sr + tr;//需增加的边界宽度
constint D = searchWindowSize*searchWindowSize;//搜索域中的元素个数
constint H = D / 2 + 1;//搜索域中的中心点位置
constdouble div = 1.0 / (double)D;//均匀分布时,搜索域中的每个点的权重大小
constint tD = templeteWindowSize*templeteWindowSize;//邻域中的元素个数
constdouble tdiv = 1.0 / (double)(tD);//均匀分布时,搜索域中的每个点的权重大小
//扩充边界
Mat boardSrc;
copyMakeBorder(src, boardSrc, bb, bb, bb, bb, cv::BORDER_DEFAULT);
//weight computation;
vector<double> weight(256 * 256 * src.channels());
double* w = &weight[0];
constdouble gauss_sd = (sigma == 0.0) ? h : sigma;//高斯标准差
double gauss_color_coeff = -(1.0 / (double)(src.channels())) * (1.0 / (h*h));//高斯颜色系数
int emax=0;
//w[i]保存方差,即邻域平均欧氏距离对应的高斯加权权重,供后面计算出欧式距离后调用
for (int i = 0; i < weight.size(); i++){
double v = std::exp(max(i - 2.0*gauss_sd*gauss_sd, 0.0)*gauss_color_coeff);
w[i] = v;
if (v<0.001){
emax = i;
break;
}
}
for (int i = emax; i < weight.size(); i++)
w[i] = 0.0;
int height = src.rows;
int width = src.cols;
if (src.channels() == 3){
constint cstep = (int)boardSrc.step - templeteWindowSize * 3;
constint csstep = (int)boardSrc.step - searchWindowSize * 3;
#pragma omp parallel for
for (int j = 0; j<height; j++){
uchar* d = dst.ptr(j);
int* ww = newint[D];//D 为搜索域中的元素数量,ww用于记录搜索域每个点的邻域方差
double* nw = newdouble[D];//根据方差大小高斯加权归一化后的权重
for (int i = 0; i<width; i++){
double tweight = 0.0;
//search loop
uchar* tprt = boardSrc.data + boardSrc.step * (sr + j) + 3 * (sr + i);
uchar* sptr2 = boardSrc.data + boardSrc.step * j + 3 * i;
for (int l = searchWindowSize, count = D - 1; l--;){
uchar* sptr = sptr2 + boardSrc.step * (l);
for (int k = searchWindowSize; k--;){
//templete loop
int e = 0;
uchar* t = tprt;
uchar* s = sptr + 3 * k;
for (int n = templeteWindowSize; n--;){
for (int m = templeteWindowSize; m--;){
// computing color L2 norm
e += (s[0] - t[0])*(s[0] - t[0]) + (s[1] - t[1])*(s[1] - t[1]) + (s[2] - t[2])*(s[2] - t[2]);//L2 norm
s += 3;
t += 3;
}
t += cstep;
s += cstep;
}
constint ediv = e*tdiv;
ww[count--] = ediv;
//get weighted Euclidean distance
tweight += w[ediv];
}
}
//weight normalization
if (tweight == 0.0){
for (int z = 0; z<D; z++) nw[z] = 0;
nw[H] = 1;
}else{
double itweight = 1.0 / (double)tweight;
for (int z = 0; z<D; z++) nw[z] = w[ww[z]] * itweight;
}
double r = 0.0, g = 0.0, b = 0.0;
uchar* s = boardSrc.ptr(j + tr); s += 3 * (tr + i);
for (int l = searchWindowSize, count = 0; l--;){
for (int k = searchWindowSize; k--;)
{
r += s[0] * nw[count];
g += s[1] * nw[count];
b += s[2] * nw[count++];
s += 3;
}
s += csstep;
}
d[0] = saturate_cast<uchar>(r);
d[1] = saturate_cast<uchar>(g);
d[2] = saturate_cast<uchar>(b);
d += 3;
}//i
delete[] ww;
delete[] nw;
}//j
} elseif (src.channels() == 1){
constint cstep = (int)boardSrc.step - templeteWindowSize;//在邻域比较时,从邻域的上一行末尾跳至下一行开头
constint csstep = (int)boardSrc.step - searchWindowSize;//搜索域循环中,从搜索域的上一行末尾跳至下一行开头
#pragma omp parallel for
for (int j = 0; j<height; j++){
uchar* d = dst.ptr(j);
int* ww = newint[D];
double* nw = newdouble[D];
for (int i = 0; i<width; i++){
double tweight = 0.0;
uchar* tprt = boardSrc.data + boardSrc.step * (sr + j) + (sr + i);
uchar* sptr2 = boardSrc.data + boardSrc.step * j + i;
for (int l = searchWindowSize, count = D - 1; l--;){
uchar* sptr = sptr2 + boardSrc.step * (l);
for (int k = searchWindowSize; k--;){
int e = 0;
uchar* t = tprt;
uchar* s = sptr + k;
for (int n = templeteWindowSize; n--;){
for (int m = templeteWindowSize; m--;){
e += (*s - *t)*(*s - *t);
s++;
t++;
}
t += cstep;
s += cstep;
}
constint ediv = e*tdiv;
ww[count--] = ediv;
tweight += w[ediv];
}
}
if (tweight == 0.0){
for (int z = 0; z<D; z++) nw[z] = 0;
nw[H] = 1;
}else{
double itweight = 1.0 / (double)tweight;
for (int z = 0; z<D; z++) nw[z] = w[ww[z]] * itweight;
}
double v = 0.0;
uchar* s = boardSrc.ptr(j + tr); s += (tr + i);
for (int l = searchWindowSize, count = 0; l--;){
for (int k = searchWindowSize; k--;){
v += *(s++)*nw[count++];
}
s += csstep;
}
*(d++) = saturate_cast<uchar>(v);
}//i
delete[] ww;
delete[] nw;
}//j
}
}
intmain(){
Mat src = imread(".../girl.jpg");
imshow("src", src);
Mat result;
Mat dst4;
addSpeckleNoise(src,0.5,dst4);
imshow("addSpeckleNoise", dst4);
nonlocalMeansFilter(dst4, result, 3, 15, 40,40);
imshow("removeSpeckleNoise", result);
waitKey(0);
return0;
}
OpenCV 提供了非局部均值滤波算法,并对其进行了加速。
fastNlMeansDenoising()
:对单个灰度图像进行去噪。
fastNlMeansDenoisingColored()
:对彩色图像进行去噪。
fastNlMeansDenoisingMulti()
:用于连续相关灰度图像的快速去噪(例如视频中的连续灰度帧)。
fastNlMeansDenoisingColoredMulti()
:用于连续相关彩色图像的快速去噪(例如视频中的连续彩色帧)。
intmain(){
Mat src = imread(.../girl.jpg");
imshow("src", src);
Mat result;
Mat dst4;
addSpeckleNoise(src,0.5,dst4);
imshow("addSpeckleNoise", dst4);
fastNlMeansDenoisingColored(dst4,result,40,40);
imshow("removeSpeckleNoise2", result);
waitKey(0);
return 0;
}
3. 总结
非局部均值滤波能够有效地去除图像中的各种噪声,包括高斯噪声、椒盐噪声、纹理噪声等。非局部均值滤波能够较好地保留图像的细节,对噪声的类型和分布不敏感,具有较强的鲁棒性。
当然,非局部均值滤波的缺点也很明显:计算量大,容易受到图像边缘的影响等等。
非局部均值滤波的计算量大、速度慢是可以通过减少搜索窗口大小、采用快速相似度计算方法、利用图像的稀疏性、并行化计算、利用硬件加速等方法来加速。
推荐阅读












